I remember when I was younger I used to play the game of hide-and-seek a lot. This is a game where a group of people (at least two) separate into a group of hiders and a group of seekers. The most common version of this that I’ve seen is having one person as the seeker and everyone as hiders. Initially, the seeker(s) is given a number to count towards and close their eyes while counting. The hiders then search for places to hide from the seeker. Once the seeker is finished counting, their job is to find where everyone is hiding or admitting that they cannot find all the seekers. Any seekers not found are said to have won, and seekers that are found are said to have lost.
I played this game a number of times in my childhood, but I remember playing it with a friend named Dennis in particular. Dennis had a certain way he played as seeker. While many of us would simply go to places we deemed as “likely” hiding spots in a somewhat random order, Dennis would always begin by looking in one area of the room, making sure that he had searched through every area connected to that area before going to a new area. He continued this process until he either found everybody or concluded that he had searched every spot he could think of and gave up.
It wasn’t until years later that I was able to note the similarity between Dennis’s way of playing hide-and-seek and the Depth-First-Search algorithm. The Depth-First-Search Algorithm is a way of exploring all the nodes in a graph. Similar to hide-and-seek, one could choose to do this in a number of different ways. Depth-First-Search does this by beginning at some node, looking first at one of the neighbors of that node, then looking at one of the neighbors of this new node. If the new node does not have any new neighbors, then the algorithm goes to the previous node, looks at the next neighbor of this node and continues from there. Initially all nodes are “unmarked” and the algorithm proceeds by marking nodes as being in one of three states: visited nodes are marked as “visited”; nodes that we’ve marked to visit, but have not visited yet are marked “to-visit”; and unmarked nodes that have not been marked or visited are “unvisited”.
Consider a bedroom with the following possible hiding locations: (1) Under Bed, (2) Behind Cabinet, (3) In Closet, (4) Under Clothes, (5) Behind Curtains, (6) Behind Bookshelf, and (7) Under Desk. We can visualize how the bedroom is arranged as a graph and then use a Breadth First Search algorithm to show how Brent would search the room. Consider the following bedroom arrangement, where we have replaced the names of each item by the number corresponding to that item. Node (0) corresponds to the door, which is where Dennis stands and counts while others hide.

Now consider how a Breadth First Search would be run on this graph.

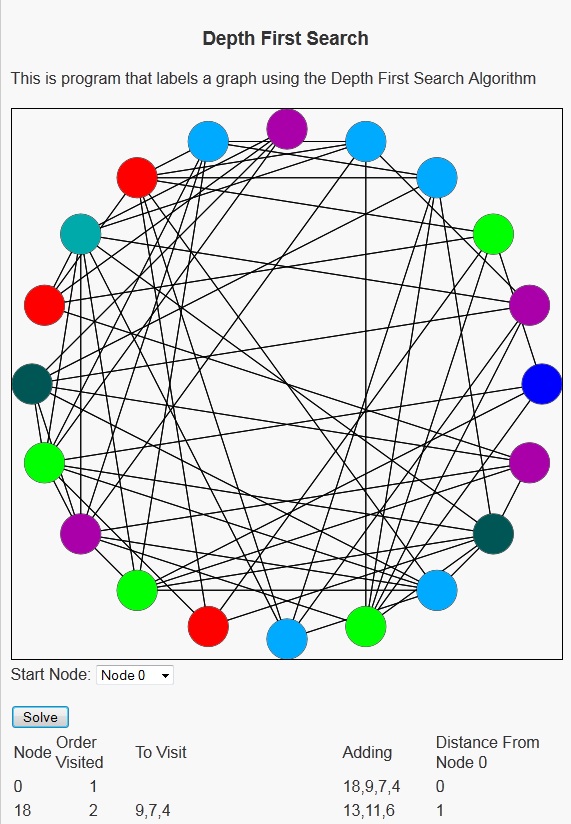
The colors correspond to the order in which nodes are visited in Depth-First-Search.
The way we read this is that initially Dennis would start at node 0, which is colored in Blue.
While Dennis is at node 0, she notices that nodes 1, 5, and 6 (under bed, behind curtains, and behind bookshelf) are the nearby and have not been checked yet so she places them on the “to visit” list.
Next, Dennis will begin to visit each node on the “to visit” list, and when a node is visited, she labels it as visited. At each location, she also takes note of the other locations she can reach from this location. Below is the order of nodes Dennis visits and how he discovers new locations to visit.
| Order Visited | Node | Queue | Adding | Distance From Node 0 |
| 1 | 0 | 6,5,1 | 0 | |
| 2 | 6 | 5,1 | 7,3,2 | 1 |
| 3 | 7 | 3,2,5,1 | 2 | |
| 4 | 3 | 2,5,1 | 2 | |
| 5 | 2 | 5,1 | 4 | 2 |
| 6 | 4 | 5,1 | 3 | |
| 7 | 5 | 1 | 1 | |
| 8 | 1 | 1 |
Here is a link to my Examples page that implements the Depth-First-Search Algorithm on Arbitrary Graphs.
Leave a Reply